Nazanin Minaian
Ph.D. in Mechanical Engineering | Research Faculty
University of Nevada, Las Vegas
Active Materials and Smart Living (AMSL) Lab
Biography
Nazanin Minaian, Ph.D., is a mechanical engineer and researcher specializing in bio-inspired sensing systems and smart materials. Her doctoral research at the University of Nevada, Las Vegas, conducted in the Active Materials and Smart Living (AMSL) Lab, focused on electroactive polymers (EAPs) for flow sensing and energy harvesting.
Drawing inspiration from aquatic sensory organs, her research focused on the development of EAP-based “artificial skin” and canal-type sensors capable of detecting fluid dynamics in underwater environments. Her work bridges materials science, fluid mechanics, and biomimetic design to advance technologies for underwater robotics, renewable energy, and soft sensing platforms.
Beyond her research, Nazanin is committed to mentorship and scientific community building, guiding students through interdisciplinary projects in smart materials and experimental design. She is passionate about innovation that connects natural principles with human-centered technology.
- Electroactive Polymers (EAP)
- Imaging and Image Processing
- Bio-Inspired Robotic Designs
PhD in Mechanical Engineering, 2025
University of Nevada, Las Vegas
MS in Aerospace Engineering, 2024
University of Nevada, Las Vegas
BS in Mechanical Engineering, 2018
University of Nevada, Las Vegas
Skills
Python (Jupyter, OpenCV), MATLAB, Wolfram Mathematica
SolidWorks, COMSOL Multiphysics, Autodesk Fusion 360, Simpleware ScanIP
SEM, FFT Analysis, Additive Manufacturing, Laser Cutting, DMA
DSLR, PIV (Planar and Volume), Motion Tracking
Project Reports, SOPs, Proposals, Conference Posters/Presentations, Publications
LabVIEW, OriginLab, Tecplot, LabJack, VSCode
Experience
Active Materials and Smart Living (AMSL) Lab
Responsibilities include:
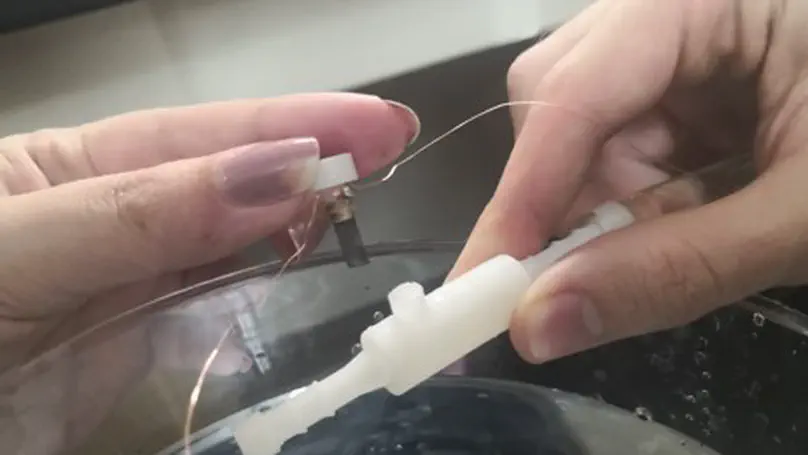
- Researched electroactive polymers (EAPs), focusing on ionic polymer-metal composites (IPMCs) and their use as flexible fluid flow sensors for naval and underwater applications.
- Communicated directly with multiple vendors for acquiring and configuring substantial equipment related to the experimental setup for ONR Grant N00014-16-1-2356.
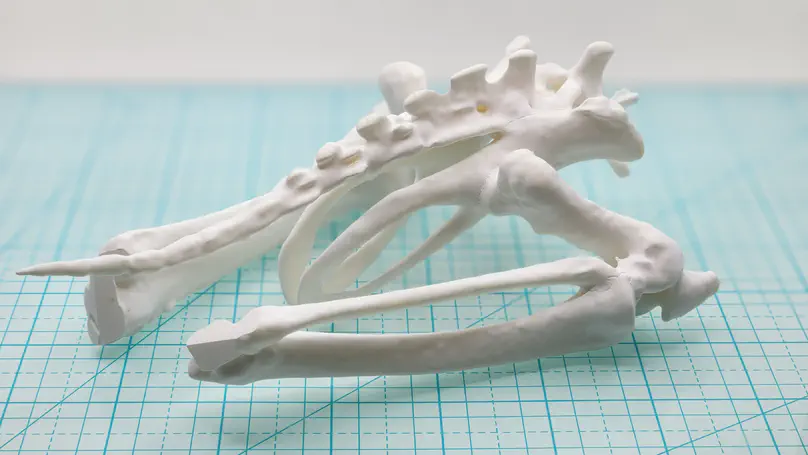
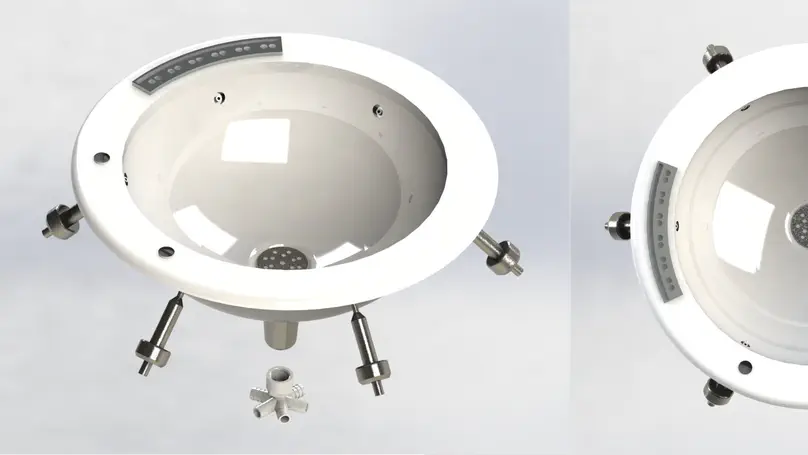
- Modeled with CAD software and utilized additive manufacturing for experimental testing platforms.
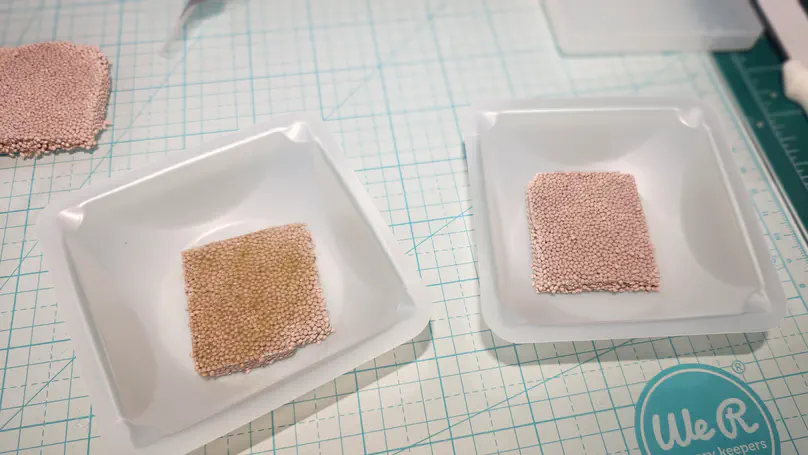
- Fabricated EAP actuators and sensors in a wet laboratory environment for applications in soft robotics and flow sensing.
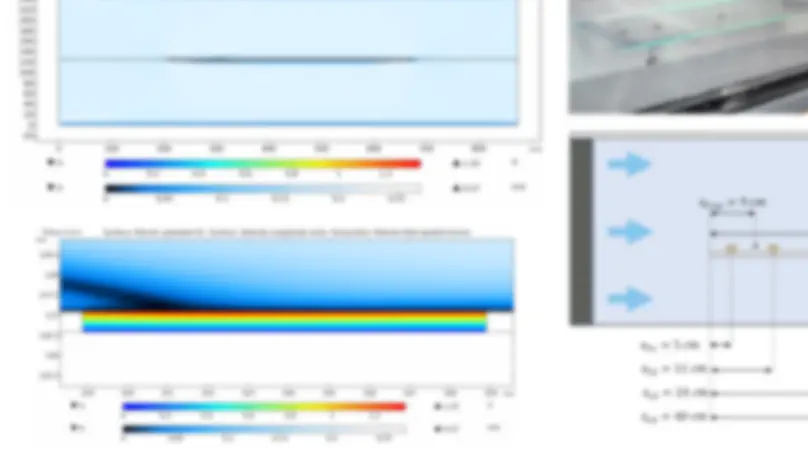
- Developed physics-based models using COMSOL software for fluid-structure interaction studies, and vortex shedding for a MEMS vortex flowmeter.
- Design of experiments and data acquisition for various EAP actuators and sensors.
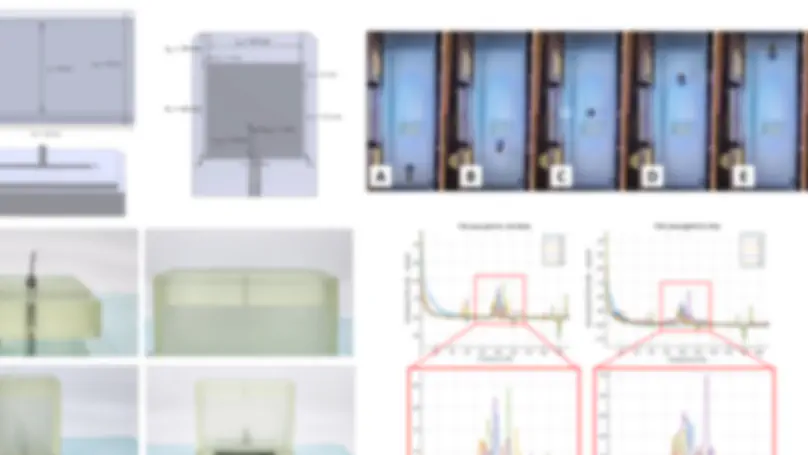
- Utilized various imaging and image processing techniques; including the development of a computer vision-based software in Wolfram Mathematica for tracking sensor deflection, travel velocity, and vortex shedding.
- Lead on Particle Imaging Velocimetry (PIV) equipment attainment and setup. Wrote Standard Operating Procedure and implemented safety protocols for use.
Soft Mechatronics (SM) & Robotics Lab
Responsibilities include:
- Collaborated with a multinational team in South Korea researching soft-robotics and artificial muscles at the Korea Advanced Institute of Science and Technology (NSF Grant #1545857).
- Fabricated and modeled a piezoelectric energy harvesting ring-type transducer comprised of a PVDF film supported by a PDMS substrate
- Fabricated EAP actuators and sensors in a wet laboratory environment for applications in soft robotics and flow sensing.
- Designed and assembled a testing apparatus for the energy harvester ring, along with a fingerbending model using additive manufacturing and laser cutting.
Projects


Recent Publications
Popular Topics
Contact
- nazanin.minaian@gmail.com
- (702) 744-7082
- 4505 S Maryland Pkwy, Las Vegas, NV 89154
- Office 2173 - Please request permission from downstairs help desk to visit 2nd floor.